Frozen Deployment Under Drift
Deployment risk is a tangent-geometry problem.
This project develops a formal account of long-horizon deployment instability for frozen predictors under dynamic covariate drift.
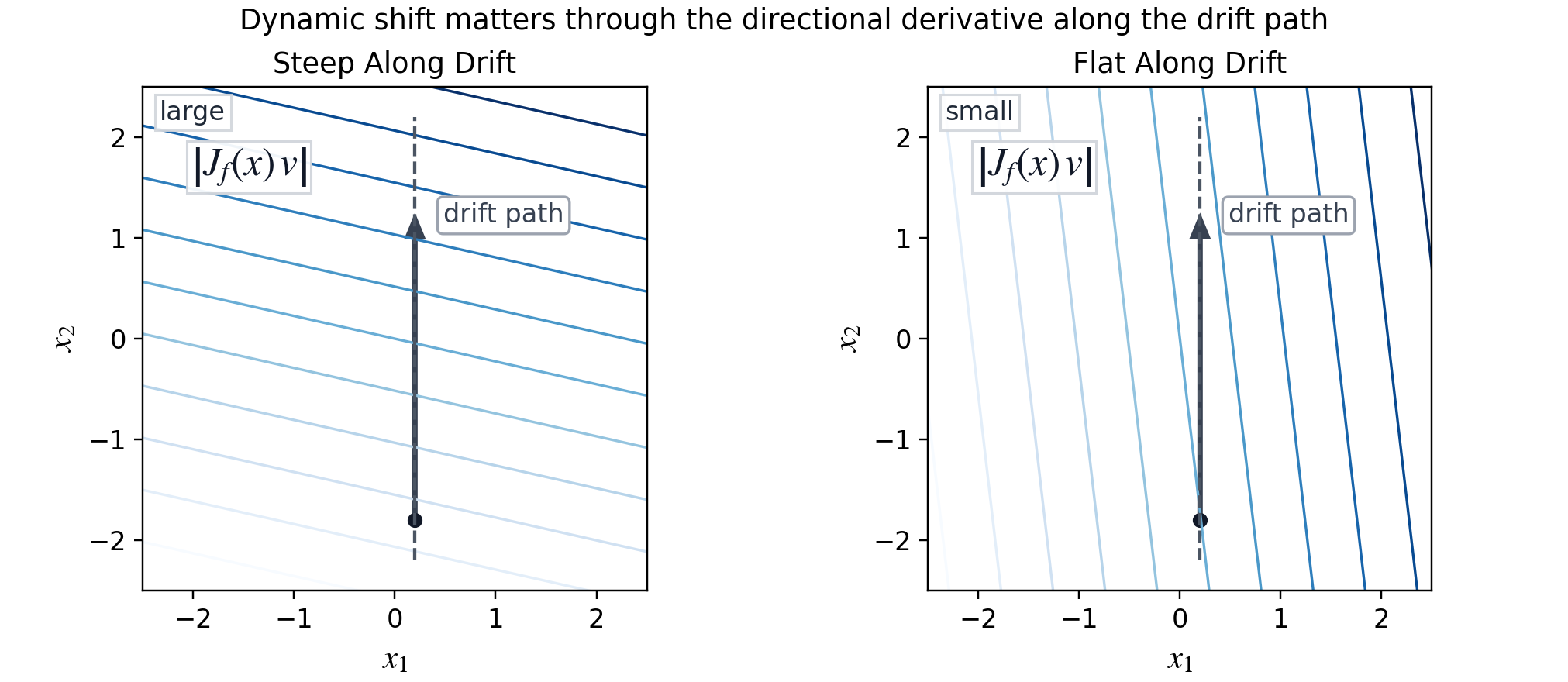
The central object is the Jacobian-velocity interaction \(J_f(X_t)\dot X_t\): environmental motion only becomes dangerous when it passes through directions where the model is locally steep.
The practical implication is that robustness should not be spread uniformly over every direction in feature space, but concentrated where deployment drift is actually expected to travel. That same directional geometry also gives a natural monitoring signal, linking training-time regularization and deployment-time volatility assessment through one coherent mechanism.
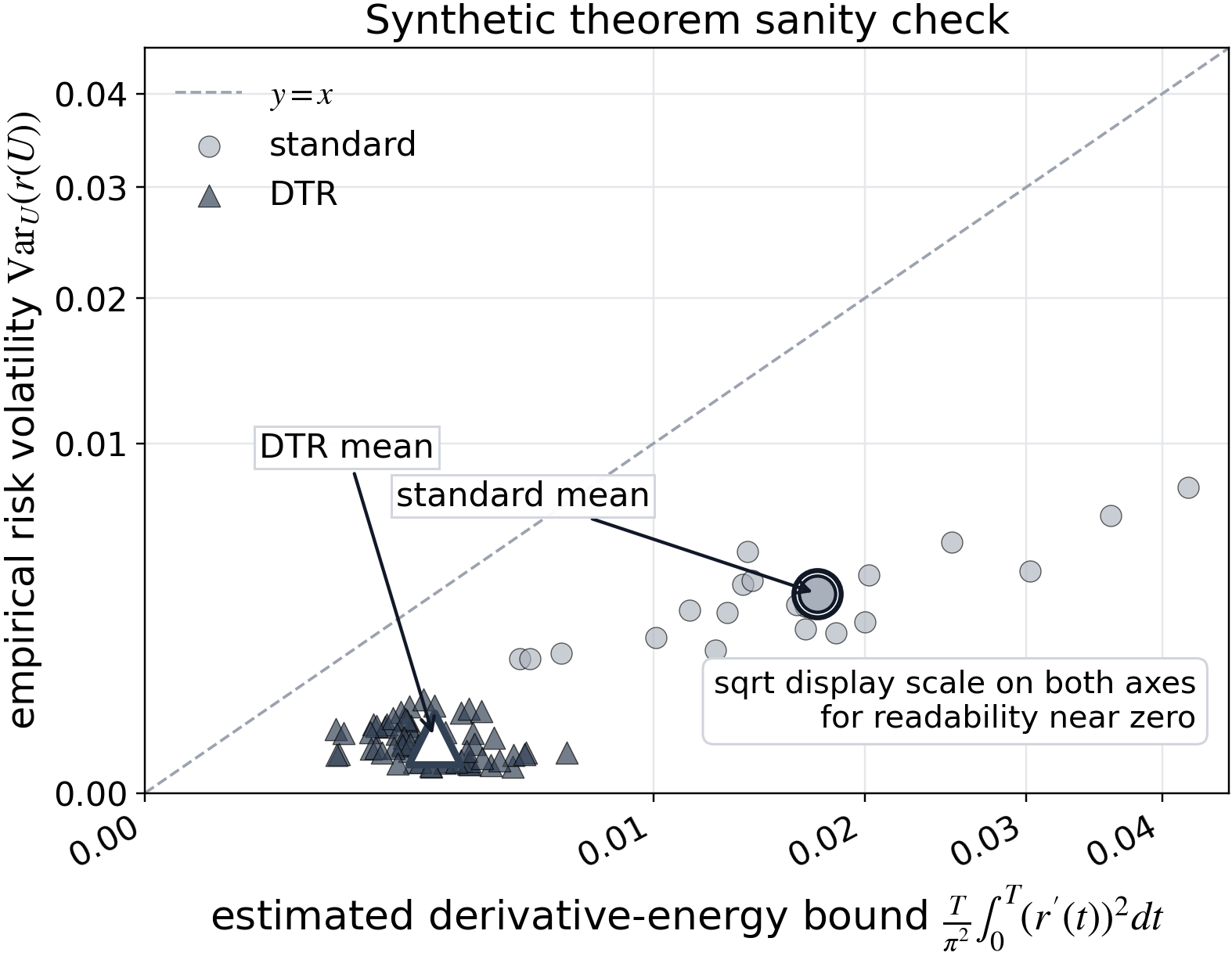
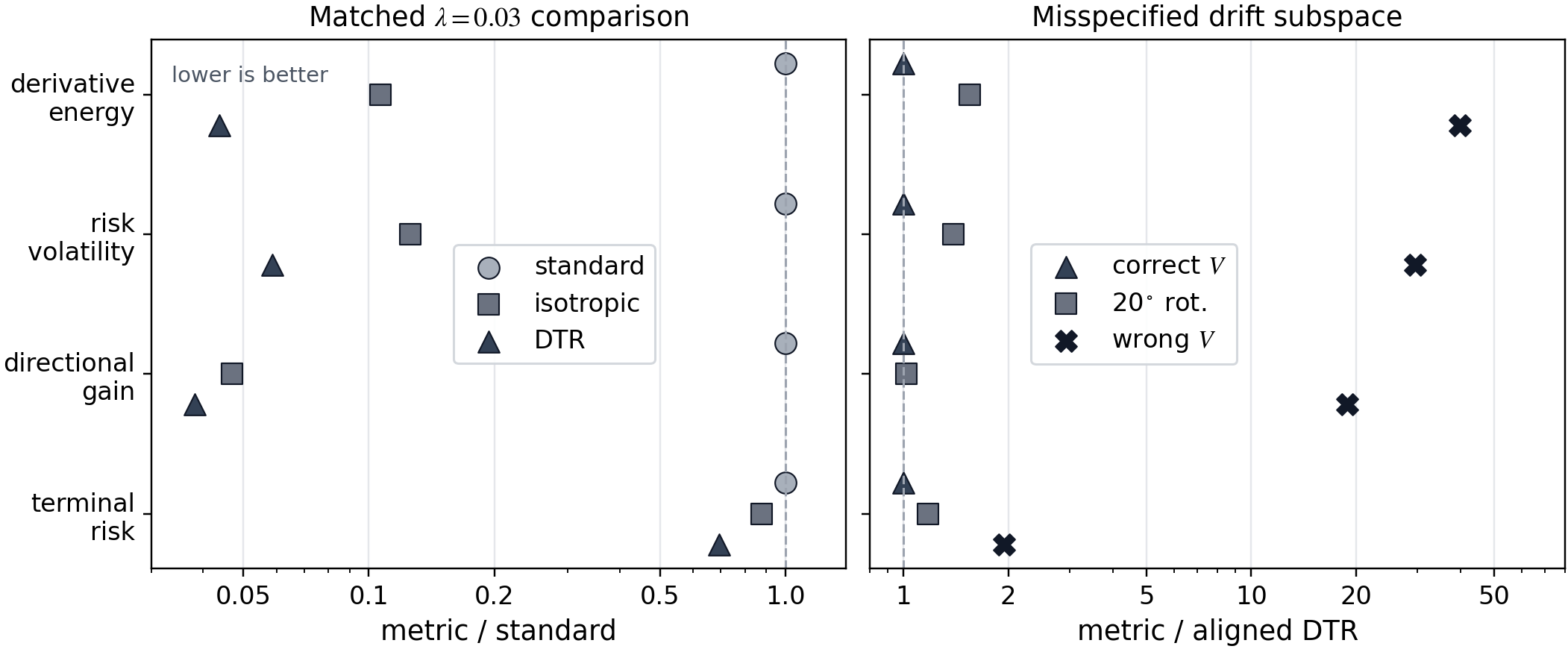
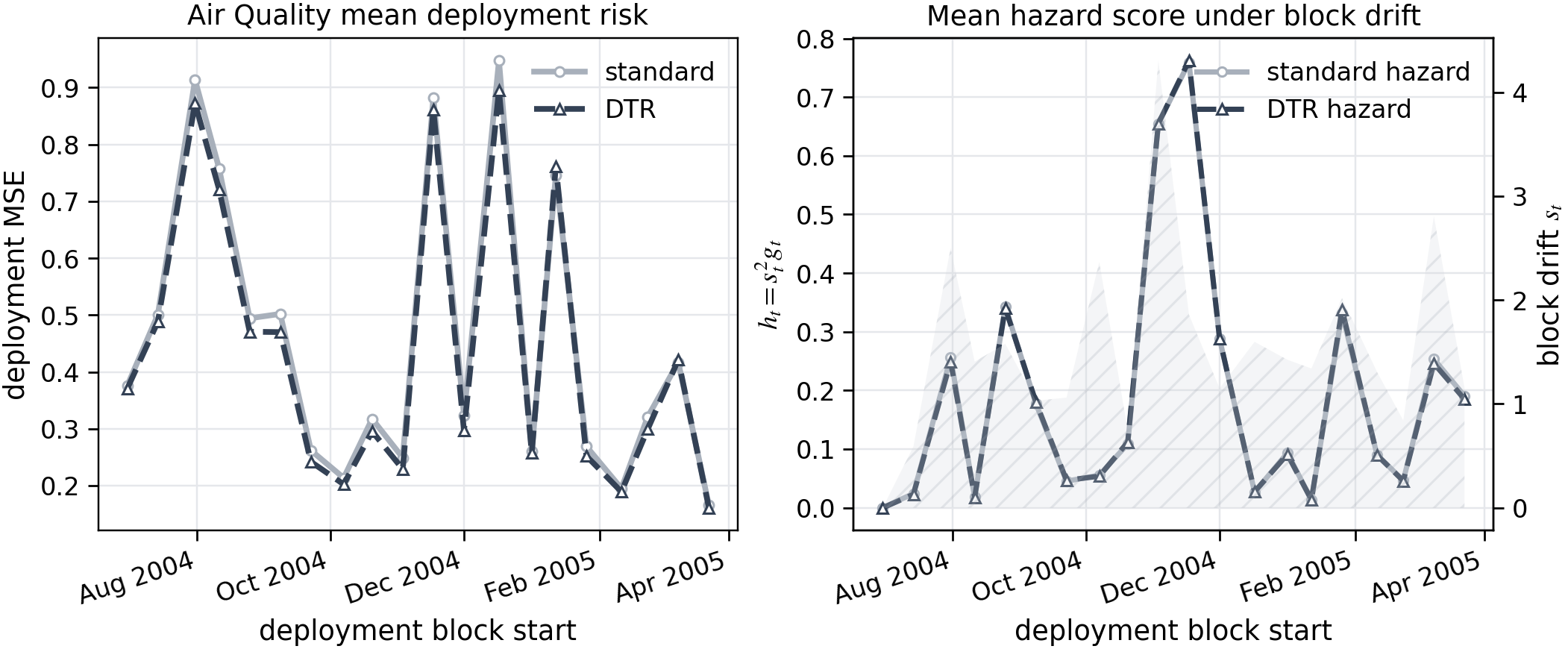
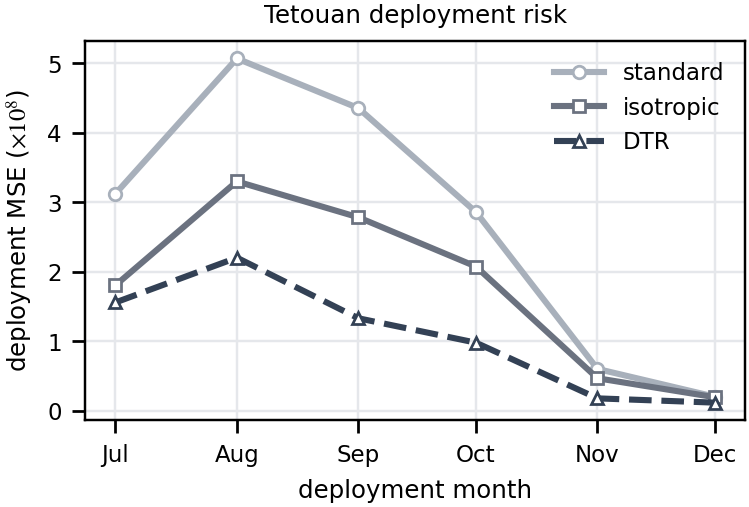
The empirical arc is deliberately staged: first verify the time-domain bound, then show that directional smoothing beats isotropic smoothing in a controlled low-rank setting, and finally test the same story on two real frozen deployments, UCI Air Quality and Tetouan City power consumption.
In the rank-1 setting, a short bookkeeping proposition makes the monitoring proxy gap explicit: block averaging, residual drift, and angular misalignment determine how the hazard proxy departs from the leading low-rank term.
The repository also includes a dedicated proof-verification suite: symbolic identities, numerical stress tests, and cached-summary checks are collected into an HTML report that follows the same visual language as this site.